


I robot del futuro per l'esplorazione di asteroidi
Ingegneri americani progettano un robot flessibile che sarà di grande aiuto nelle attività di esplorazione ed estrazione su asteroidi


Gli asteroidi possono essere di varie forme e dimensioni.
La stragrande maggioranza, però, ha forma sferica ed è costituita da un gruppo di massi, uniti tra loro in maniera precaria.
In gergo (non molto rispettoso, bisogna dire) tale tipologia viene definita “rubble pile”, cioè ammasso di detriti.
Atterrare su un rubble pile non è cosa facile, come ben dimostrato dalla sonda Philae poco meno di un decennio fa.
Ecco perché, qualche anno fa, ha suscitato molto interesse uno studio di un gruppo di ricercatori della University of Colorado, Boulder, che promette di facilitare enormemente l’esplorazione e le attività estrattive su asteroidi.
Robot flessibili alla conquista di asteroidi
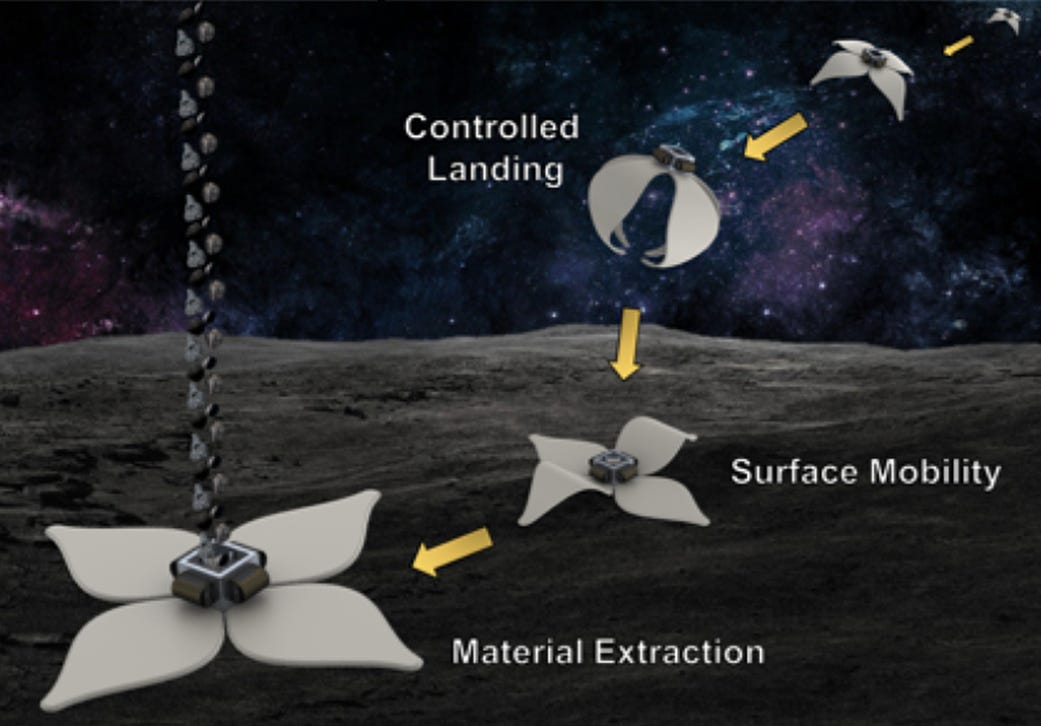
L’idea di Jay McMahon e del suo team è chiamata Area-of-Effect Softbots (AoES), traducibile come “robot flessibili ad area d’effetto”, ed inizia a vedere la luce nel 2017, col finanziamento della NASA.
Essa consiste nel realizzare un robot che riesca non solo ad aderire a superfici dalla gravità molto bassa, come quella di un asteroide, ma che possa anche scavarle alla ricerca di materiali di valore.
In passato l’attracco è stato ottenuto (e non sempre con successo, come detto) utilizzando sistemi di ancoraggio, che però hanno il problema di rendere difficili sia il distacco che lo spostamento superficiale delle sonde.
I softbot, solitamente impiegati sulla Terra in operazioni di soccorso in ambienti pericolosi, presentano invece una serie di vantaggi:
riescono ad aderire efficacemente alla superficie di un asteroide;
una volta sulla superficie, sono in grado di strisciarvi sopra;
hanno la capacità di staccarsi dalla superficie con un “salto”;
possono spostarsi in un altro punto dell’asteroide usando il principio delle vele solari.
Come i softbot aderiscono agli asteroidi
Poiché un asteroide di tipo rubble pile ha una bassa gravità superficiale, in realtà è qualcos’altro che tiene i massi uniti: si tratta della forza di van der Waals, che si manifesta a ogni punto di contatto tra massi.
La capacità di adesione degli AoES si basa sullo stesso principio, consentendo alla parte flessibile del robot, che può essere larga e fatta di vari materiali, di aderire alla superficie dell’asteroide.
In aggiunta, come riporta Andy Tomaswick su Universe Today, i softbot posseggono anche una forza detta di “elettroadesione”, che usa degli elettrodi situati nella parte flessibile del robot per generare una carica.
Ciò crea anche una carica opposta sulla superficie, che stabilizza ulteriormente il softbot, dato che cariche opposte si attraggono.
{kind=link}
Lo spostamento dei softbot sulla superficie
Per spostarsi sulla superficie, invece, gli AoES usano un particolare tipo di attuatore, cioè un componente dedicato al movimento e al controllo, detto attuatore HASEL.
Tale componente consente a una parte del softbot (quella frontale, ad esempio) di aderire alla superficie, mentre un’altra parte (quella centrale, ad esempio) si contrae, generando a tutti gli effetti un movimento simile a quello di un verme.
Se invece ci si vuole muovere più velocemente, si può spiccare un vero e proprio balzo.
In pratica, a partire dalla posizione di cui sopra, la parte in contrazione viene rapidamente svincolata, nello stesso momento in cui viene interrotta l’adesione dell’altra.
Ciò fa sì che il softbot si stacchi dall’asteroide e salti direttamente al prossimo punto di interesse sullo stesso.
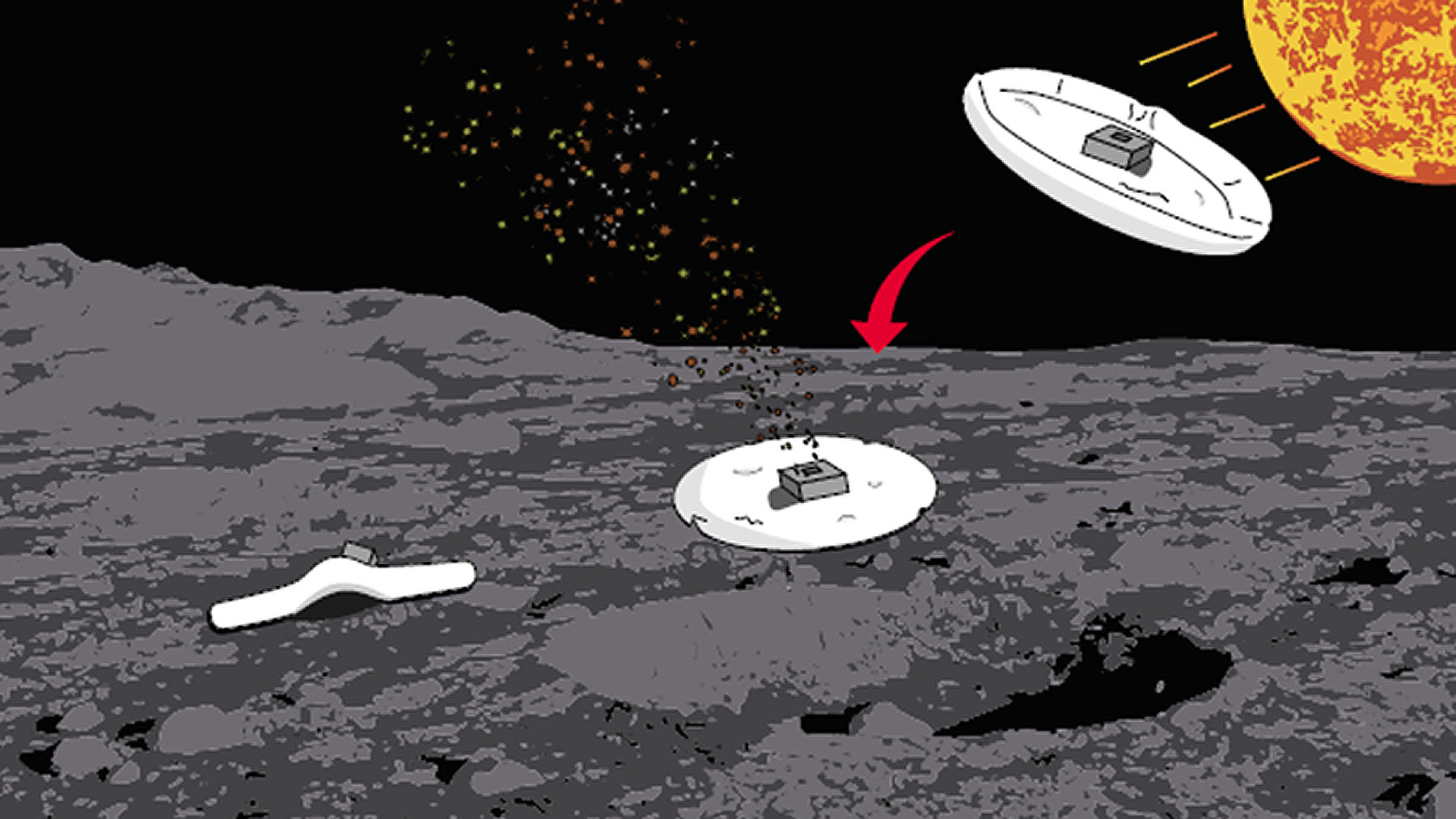
Infine, per spostarsi ancora più rapidamente, gli AoES possono trasformarsi in delle vere e proprie vele solari.
Per farlo, il softbot estende al massimo le sue appendici, facendole colpire dalla luce solare, che le spingerà come se fossero delle vele.
{kind=link}
Le attività estrattive e lo stato della ricerca
Una volta raggiunta la destinazione, uno o più softbot inizieranno a scavare nella superficie, per poi depositare i materiali ottenuti in un sistema di raccolta centralizzato, dove essi verranno macinati o vaporizzati.
Infine, il materiale semilavorato potrà essere trasportato verso una nave in orbita, che provvederà a processarlo ulteriormente.
Nonostante l’eleganza e flessibilità di questa proposta, purtroppo essa non ha ricevuto ulteriori finanziamenti dopo quelli iniziali.
Ma McMahon e il suo gruppo non si sono lasciati scoraggiare e hanno proseguito ugualmente la ricerca, inclusi studi su come usare gli AoES in orbita terrestre bassa e come deviare asteroidi potenzialmente pericolosi.
Insomma, forse l’idea è ancora troppo avanti coi tempi, ma non è detto che in futuro non potremmo ritrovarci con centinaia di piccoli softbot minatori, su un asteroide ricco d’acqua ghiacciata o metalli preziosi.